


徠卡全站儀“一步測量法”地形測量方案
無人機(jī)測圖、GPS測圖是我們最優(yōu)先考慮的測圖方式,遇到密集遮擋、地下空間測圖等,我們不得不采用傳統(tǒng)全站儀進(jìn)行測圖。但在此時,使用全站儀也需要頻繁搬站才能完成,所以留給全站儀的都是最難啃的 “硬骨頭”。

傳統(tǒng)的全站儀測圖中,如何在實(shí)現(xiàn)內(nèi)外業(yè)一體化的同時又保證最高的測圖效率,啃下這塊“硬骨頭”?我們通常采用“一步測量法”,今天就要為大家介紹一種高效的徠卡全站儀“一步測量法”地形測量方案。
如何實(shí)現(xiàn)全站儀導(dǎo)線測量和碎部測量同步采集?
“一步測量法” ,即在圖根導(dǎo)線選點(diǎn)、埋樁后,導(dǎo)線測量和碎部測量同步進(jìn)行。我們首先就要實(shí)現(xiàn)導(dǎo)線測量和碎部測量同步采集。徠卡Captivate全站儀機(jī)載免費(fèi)“測量”程序就可以完成“一步法”外業(yè)數(shù)據(jù)采集全流程。
在 “測量”程序中您可以通過“前視點(diǎn)”功能進(jìn)行測量順序、測量限差的設(shè)定,實(shí)現(xiàn)圖根導(dǎo)線后視點(diǎn)和前視點(diǎn)的多測回觀測過程,如使用徠卡TS16自動型全站儀,導(dǎo)線測量的觀測過程還可以自動完成。同時“測量”程序又具備碎部點(diǎn)的采集功能,在機(jī)載“測量”程序就可以完成“一步法”外業(yè)數(shù)據(jù)采集全流程。

如何進(jìn)行“一步測量法”內(nèi)業(yè)處理?
前面已經(jīng)提到,我們通過“測量”程序就實(shí)現(xiàn)了導(dǎo)線測量和碎部測量的同步采集,內(nèi)業(yè)處理時將導(dǎo)線測量數(shù)據(jù)和碎部點(diǎn)測量數(shù)據(jù)進(jìn)行區(qū)分并分開處理就變得尤為重要,我們需要先對導(dǎo)線觀測數(shù)據(jù)進(jìn)行平差計算,后利用平差后的導(dǎo)線坐標(biāo)來改正碎部點(diǎn)的坐標(biāo)。徠卡Infinity軟件和徠卡CAD軟件均可完成 “一步測量法”內(nèi)業(yè)處理全流程。
徠卡Infinity軟件是一款較強(qiáng)的內(nèi)外業(yè)一體化數(shù)據(jù)處理軟件,既能進(jìn)行GPS處理也能進(jìn)行全站儀的數(shù)據(jù)處理,可以實(shí)現(xiàn)內(nèi)外業(yè)一體化的“一步測量法”全流程。其TPS處理模塊導(dǎo)線功能可識別導(dǎo)線觀測數(shù)據(jù)后進(jìn)行導(dǎo)線的快速編輯并實(shí)現(xiàn)導(dǎo)線的平差處理。

導(dǎo)線平差后,所有的導(dǎo)線點(diǎn)坐標(biāo)將會更新,同時相應(yīng)導(dǎo)線點(diǎn)測站也會更新,相應(yīng)的測站測量的碎部點(diǎn)坐標(biāo)也會更新,最后您可以導(dǎo)出通用格式文件用于地形圖繪制。
徠卡CAD擁有較強(qiáng)的主動導(dǎo)線編輯技術(shù)和主動式坐標(biāo)編輯技術(shù),同時擁有較強(qiáng)的導(dǎo)線平差功能。主動導(dǎo)線編輯器對導(dǎo)線進(jìn)行編輯并平差處理后,您可以在主動式坐標(biāo)編輯器中將導(dǎo)線點(diǎn)進(jìn)行鎖定,通過“重算導(dǎo)線坐標(biāo)”功能,此時所有的碎部點(diǎn)將會根據(jù)最新的導(dǎo)線成果進(jìn)行更新,這樣您就可以根據(jù)最新的碎部點(diǎn)坐標(biāo)進(jìn)行后續(xù)繪圖作業(yè)。

徠卡全站儀“一步測量法”方案總結(jié)
1、“一步測量法”圖根導(dǎo)線測量和碎部測量均在基礎(chǔ)“測量”中同步完成,外業(yè)采集具有更高的作業(yè)效率。
2、徠卡Infinity和徠卡CAD均可實(shí)現(xiàn)“一步測量法”的內(nèi)外業(yè)一體化,內(nèi)業(yè)處理都是先對導(dǎo)線觀測數(shù)據(jù)進(jìn)行平差計算,后利用平差后的導(dǎo)線坐標(biāo)來改正碎部點(diǎn)的坐標(biāo),提高了碎部點(diǎn)的點(diǎn)位精度,有效避免圖根導(dǎo)線改化引起的誤差,解決了“一步測量法”的最大應(yīng)用限制。
3、采用“一步測量法”的方式,可少設(shè)一次站,少跑一遍路,同時減少重復(fù)設(shè)站引起的對中誤差和定向觀測誤差,減少作業(yè)時間和成本,提高測圖效率。
更多相關(guān)

科力達(dá)SLAM-K120:手持三維激光掃描的革新力量
科力達(dá)SLAM-K120手持三維激光掃描儀:手持三維激光掃描的革新力量 在數(shù)字化浪潮席卷全球的今天,三維激光掃描技術(shù)正以前所未有的速度改變著傳統(tǒng)測繪行業(yè)的面貌。...

掌握北斗定位關(guān)鍵技術(shù) 不懼任何競爭對手
2018年8月25日7時52分,我國用長征三號乙運(yùn)載火箭以“一箭雙星”方式,成功發(fā)射第35、36顆北斗導(dǎo)航衛(wèi)星。這使得我國北斗三號全球系統(tǒng)組網(wǎng)衛(wèi)星數(shù)量增至12顆,朝著年底建成北斗三號基本系統(tǒng),為...

高精度定位技術(shù)RTK(實(shí)時動態(tài)定位:Real-TimeKinematic)
隨著衛(wèi)星定位技術(shù)的快速發(fā)展,人們對快速高精度位置信息的需求也日益強(qiáng)烈。而目前使用最為廣泛的高精度定位技術(shù)就是RTK(實(shí)時動態(tài)定位:Real-TimeKinematic),RTK技術(shù)的關(guān)鍵在于使用了...
徠卡3D Disto在汽車傳感器定位校準(zhǔn)中的應(yīng)用
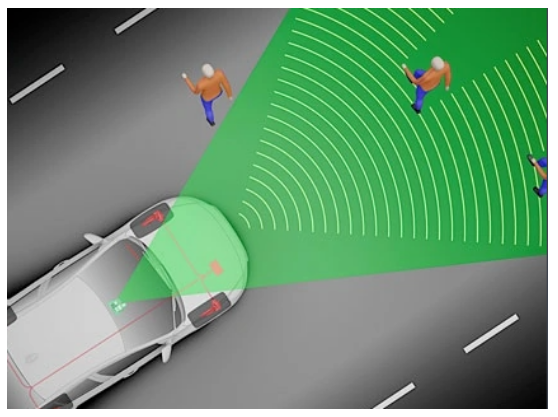
自動駕駛汽車依靠人工智能、視覺計算、雷達(dá)、監(jiān)控裝置和全球定位系統(tǒng)協(xié)同合作,讓電腦可以在沒有任何人類主動的操作下,自動安全地操作機(jī)動車輛。汽車自動駕駛技術(shù)包括視頻攝像頭、雷達(dá)傳感器以及激光測距器來了解周...

新春路上的測繪現(xiàn)場
根據(jù)自然資源部北海局工作安排,大連海洋環(huán)境監(jiān)測中心站在“旅順新港、長興島、鲅魚圈”水文站開展高程測量工作。春節(jié)前夕接到水準(zhǔn)測量任務(wù)后,自然資源部第一大地測量隊精密工程測量中隊水準(zhǔn)組的測繪隊員們,驅(qū)...

千尋星河S1便攜式無人測量船 新品發(fā)布
千尋星河S1便攜式無人測量船:水域測繪的智能革新者千尋星河S1便攜式無人測量船是千尋位置網(wǎng)絡(luò)有限公司推出的一款集高精度定位、智能控制與便攜設(shè)計于一體的小型化無人水上測量平臺。它代表了當(dāng)前水域測繪領(lǐng)域向...
三維激光掃描儀的工作原理
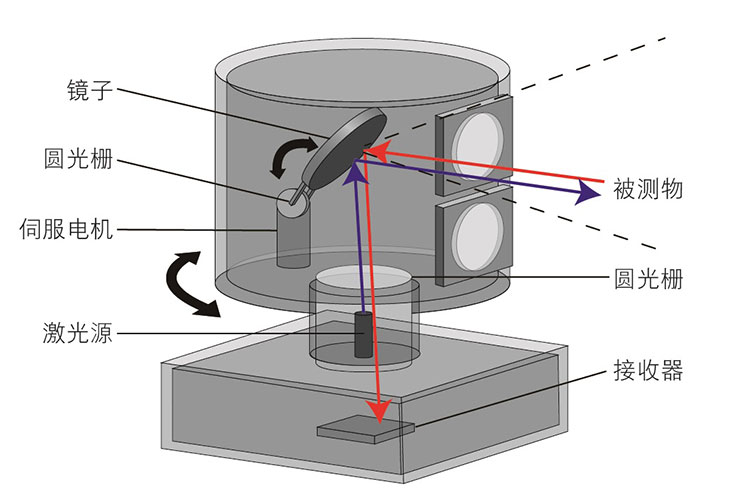
三維激光掃描儀的工作原理三維激光掃描儀是一種通過激光技術(shù)快速獲取物體表面三維空間信息的設(shè)備,廣泛應(yīng)用于測繪、建筑、工業(yè)檢測、文化遺產(chǎn)保護(hù)等領(lǐng)域。其核心原理是通過發(fā)射激光束并接收反射信號,結(jié)合精密的時間...

定期校準(zhǔn)儀器,保證測量結(jié)果準(zhǔn)確性
定期校準(zhǔn)儀器是確保測量結(jié)果準(zhǔn)確性和可靠性的重要步驟。無論是全站儀、GPS接收機(jī)、水準(zhǔn)儀、RTK設(shè)備還是其他任何測量儀器,隨著時間的推移,儀器內(nèi)部的機(jī)械部件可能會磨損,電子元件可能會老化,導(dǎo)致測量精度下...
 環(huán)球測繪微信
環(huán)球測繪微信